Arens, T. et al., 2018. Mathematik. 4. Hrsg. s.l.:Springer.
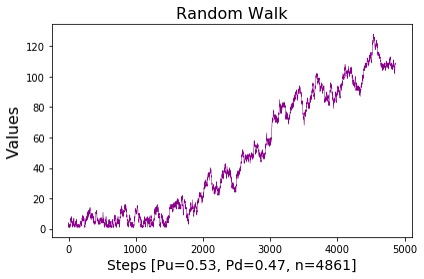
Gentle, J. E. (2002). Random Walks Ch.3. In J. E. Gentle, Elements of Computational Statistics (p. 41 von 420). Springer.
Gregory F. Lawler, V. L. (2010). Random Walk: A Modern Introduction. Cambridge Studies in Advanced Mathematics, Band 123.
Haugh, M. (2010). Introduction to Stochastic Calculus. Financial Engineering: Continuous-Time Models, 18.
Horst Rottmann, B. A. (2010). Statistik und Ökonometrie für Wirtschaftswissenschaftler – Eine anwendungsorientierte Einführung. Gabler.
James L. Cornette, B. S. (2004). Random walks in the history of life. PNAS, 187–191.
Klenke, A. (2008). Probability Theory. London: Springer.
Konstantopoulos, T. (2009). MARKOV CHAINS AND RANDOM WALKS. Introductory lecture notes. University of Liverpool.
Nelson, E. (August 2001). Dynamical Theories of Brownian Motion. Princeton University Press.
Oksendal, B. (2013). Stochastic Differential Equations – An Introduction with Applications. Springer.
Peter Mörters, Y. P. (März 2010). Brownian Motion. Cambridge Series in Statistical and Probabilistic Mathematics, Band 30.
Saloff-Coste, L. (2004). Random Walks on Finite Groups. Probability on Discrete Structures , pp 263-346.
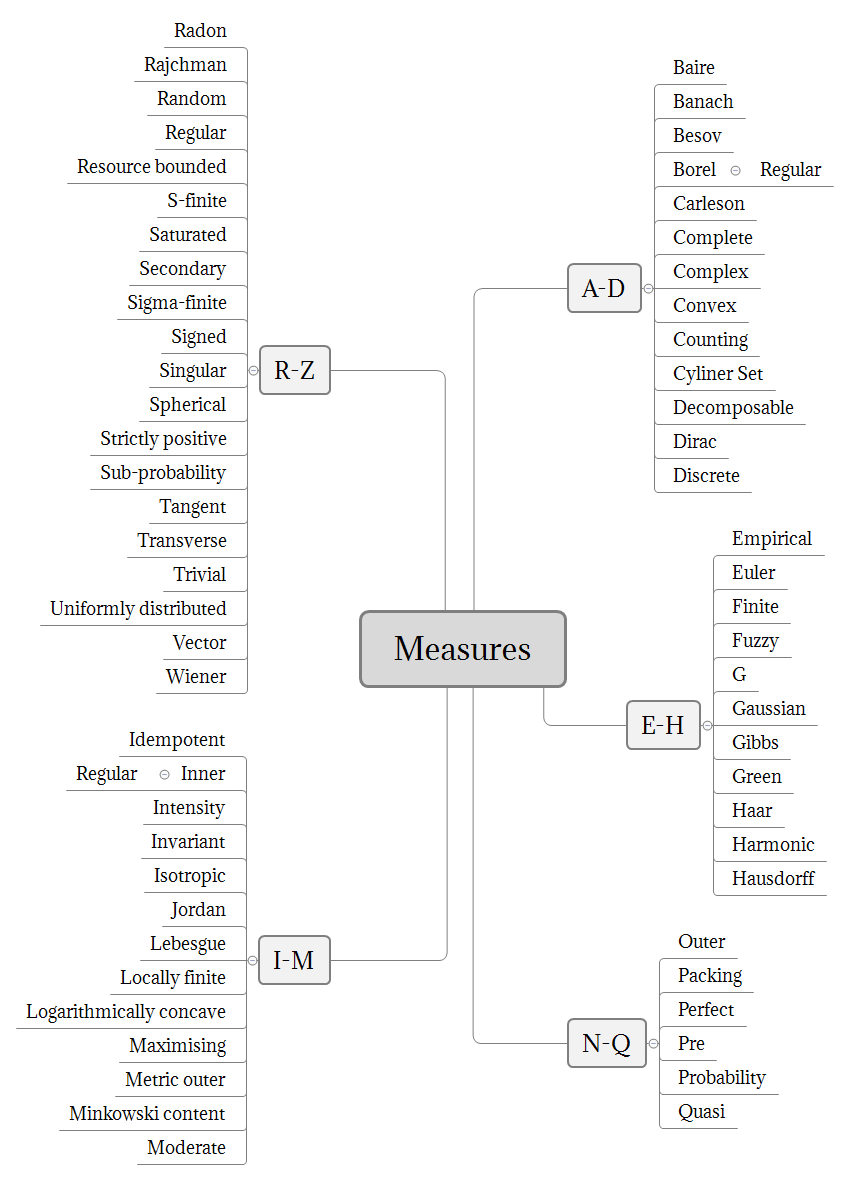
Sazonov, V. (2011, Februar 7). Encyclopedia of Mathematics. Retrieved from http://www.encyclopediaofmath.org/index.php?title=Measure&oldid=29871
Sousi, P. (October 2013). Advanced Probability. UK: University of Cambridge.
Szabados, T. (August 1994). An Elementary Introduction to the Wiener Process and Stochastic Integrals. Technical University of Budapest, 45.
Images and graphical content are taken from "wikimedia commons" database and are licensed using a CC-license if not states otherwise. If no reference is granted, the content belongs to the author.
Otherwise used Images and graphical content:
- abstract painting art artistic von Anni Roenkae (Pexels Lizenz)